概要
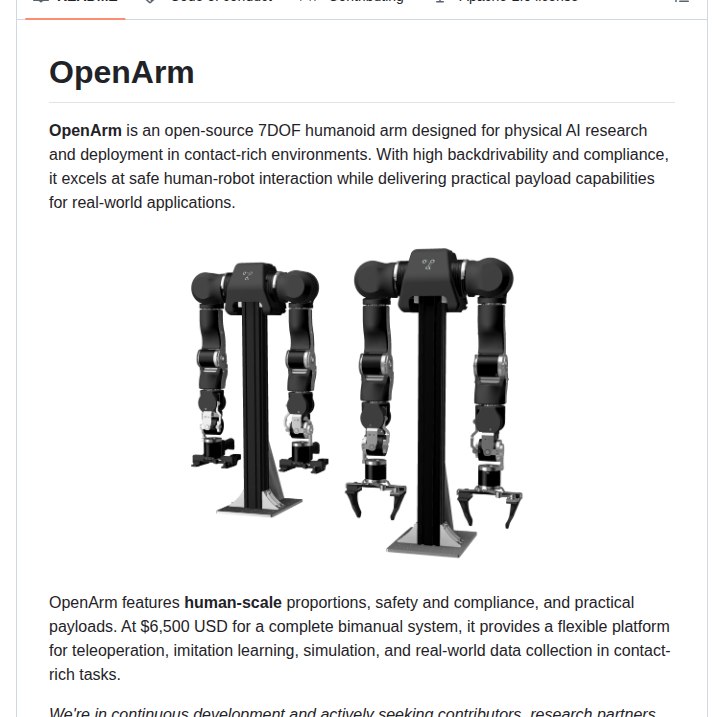
Enactic Openarmは、ロボットアームの制御を簡素化するオープンソースフレームワークです。複雑なロボット制御プログラミングの障壁を取り除き、研究者やメーカー、エンジニアが直感的にロボットアームを動作させられる環境を提供します。GitHub上で積極的に開発が進められており、ハードウェア依存性を最小化した設計により、異なるロボットアーム機種への汎用的な適用が可能。ROS(Robot Operating System)との連携も想定された構成で、ロボティクス業界全体での再利用性を高めています。
主な機能
-
統一的なアーム制御API:メーカーやモデルの異なるロボットアームに対して、単一のインターフェースで制御命令を発行できます。URロボットやABBロボット、カスタムアームなど多様な機種に対応。
-
キネマティクス・ダイナミクス計算:順運動学・逆運動学の自動計算により、エンドエフェクタの目標位置から各関節の角度を効率的に求められます。衝突回避やパス計画の基盤となる機能。
-
トラジェクトリ生成:複数の目標ポイントを指定すると、滑らかで実行可能な軌跡を自動生成します。加速度制限やジャーク制限も適用可能。
-
シミュレーション環境統合:PyBulletやGazeboとの連携により、実機導入前の動作確認やプログラム検証をシミュレータ上で実施できます。
-
センサーフィードバック処理:力覚センサ・画像センサ・IMUなど複数センサからのデータを統一フォーマットで取得し、制御ループに組み込めます。
-
マルチアーム同期制御:複数のロボットアームを同時に動作させる場合、時間同期や力のバランス調整を一括管理できます。
技術スタック
- コア言語:Python 3.8+(メイン実装)、C++(パフォーマンス要求箇所)
- ロボティクスフレームワーク:ROS 2(オプション)、ROS Classic対応モジュール
- キネマティクス計算:URDF(Unified Robot Description Format)パーサー内蔵、Pinocchio連携
- シミュレーション:PyBullet、Gazebo、V-REP互換インターフェース
- 依存ライブラリ:NumPy、SciPy、Matplotlib(可視化用)
- 通信プロトコル:TCP/IP、UDP、Modbus、オーナー独自プロトコル対応
- 開発環境:CMake、Docker対応(開発環境の標準化)
導入方法
Pythonの場合、pipでの直接インストールが可能です:
pip install openarm
GitHubリポジトリから最新開発版をインストールする場合:
git clone https://github.com/enactic/openarm.git
cd openarm
pip install -e .
ロボットハードウェアの設定ファイル(URDF形式)を準備し、制御対象アームの仕様に応じて設定ファイルをカスタマイズします:
from openarm import RobotArm
# アーム定義の読み込み
arm = RobotArm.from_urdf('path/to/robot_config.urdf')
# 目標位置への移動
arm.move_to(position=[0.5, 0.3, 0.8], orientation=[0, 0, 0])
Docker環境での実行を推奨する場合、提供されるDockerfileを利用して構築します:
docker build -t openarm:latest .
docker run -it openarm:latest bash
競合比較
| 項目 | Enactic Openarm | MoveIt | Pyrobotics |
|---|---|---|---|
| 主な強み | シンプル・学習曲線緩和 | ROS統合・業界標準 | 教育用・直感的API |
| 対応言語 | Python / C++ | C++ / Python | Python |
| 汎用性 | 中規模〜大規模アームに特化 | あらゆるロボット構成に対応 | 小型・教育用ロボット向け |
| シミュレーション統合 | PyBullet・Gazebo対応 | Gazebo標準装備 | 限定的 |
| 学習コスト | 低〜中 | 中〜高 | 低 |
Enactic Openarmは、ROS環境を必須としない軽量性と使いやすさが差別化ポイント。MoveItはROS 2との深い統合により大規模プロジェクトに向き、業界標準として信頼性が高い。Pyroboboticsは教育現場での採用を目指した単純なAPIが特徴。Openarmは既存ROS資産を活かしつつ、スタンドアロン実行も容易という中庸のポジションを確保している。
こんな人におすすめ
-
ロボティクス研究者:複数の異なるロボットアームプラットフォームを扱う研究では、統一的なAPI層により実験コードの移植性が高まり、開発効率が向上します。
-
メーカー・ホビイスト:自作ロボットアームやカスタムロボットの制御に、複雑なファームウェアハンドリングなしで初期速度で動作確認できるため、プロトタイピング段階の時間短縮が実現。
-
産業用ロボット導入企業:既存ROS環境に段階的に統合でき、新規ロボット機種の追加時にも調整コストが最小限で済み、システム拡張に柔軟に対応。
-
ロボティクス教育の講師:複数の学生プロジェクトが異なるロボット機体を使う場合でも、単一のOpenarmインターフェースで教える側の負担が減り、学習効果の平準化が可能。
-
自動化システムインテグレーター:ロボットアーム単体の制御にとどまらず、外部センサやPLC連携との組み合わせを容易に実装でき、ワンストップソリューションの提供が実現。